Ρομποτική: Η επόμενη γενεά των υποθαλάσσιων οχημάτων

Η έννοια του MUM του Thyssenkrupp. Εικόνα από την Thyssenkrupp.

uSARS uLARS επιφάνεια drone. Εικόνες από το uSEA.
MUMs (και κόρες) της εφεύρεσης: Οι νύμφες και οι MUMs εμπνέουν μια νέα γενιά υποβρύχιων συστημάτων και οχημάτων. Η Elaine Maslin ρίχνει μια ματιά.
Ο κατάλογος των αιτούντων να εισέλθουν στην υποβρύχια περιοχή αναπτύσσεται γρήγορα. Οι έννοιες ποικίλλουν, από τις υποβρύχιες αυτόνομες μητέρες ικανές να μεταφέρουν μια σειρά ωφέλιμων φορτίων σε μεγάλες αποστάσεις σε σμήνη σταγονιδίων που έχουν αναπτυχθεί σε κόμβους ωκεανών που μπορούν να βρουν το δρόμο τους σε προ-προγραμματισμένες τοποθεσίες.
Στην ενέργεια: συνδέονται, όπως ονομάζεται τώρα το σύμπλεγμα των υποθαλάσσιων κοιλάδων και το ετήσιο συνέδριο που εδρεύει στο Όσλο, μερικές από αυτές τις έννοιες περιγράφηκαν, μεταξύ άλλων από δύο νορβηγικές τεχνολογικές εταιρείες και τη γερμανική Thyssenkrupp, μια επιχείρηση που χρησιμοποιείται περισσότερο για το σχεδιασμό ναυτικών υποβρυχίων συστημάτων.
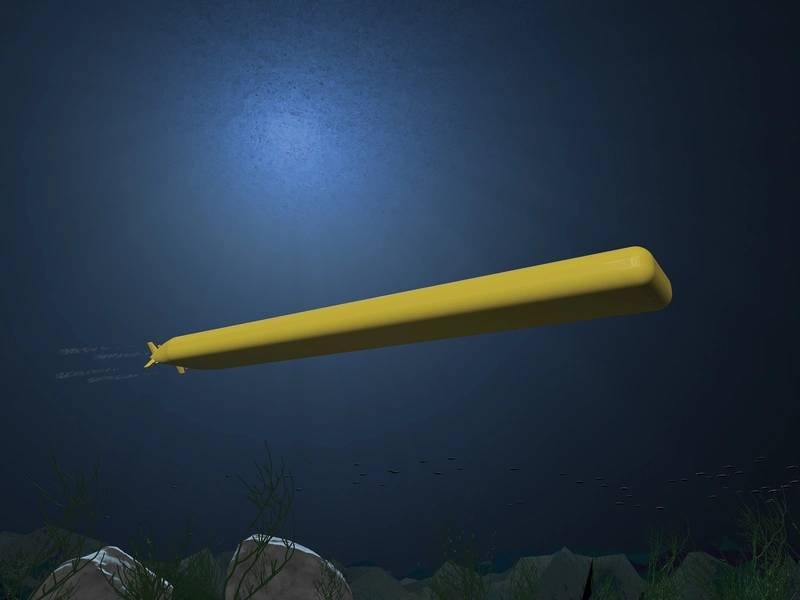
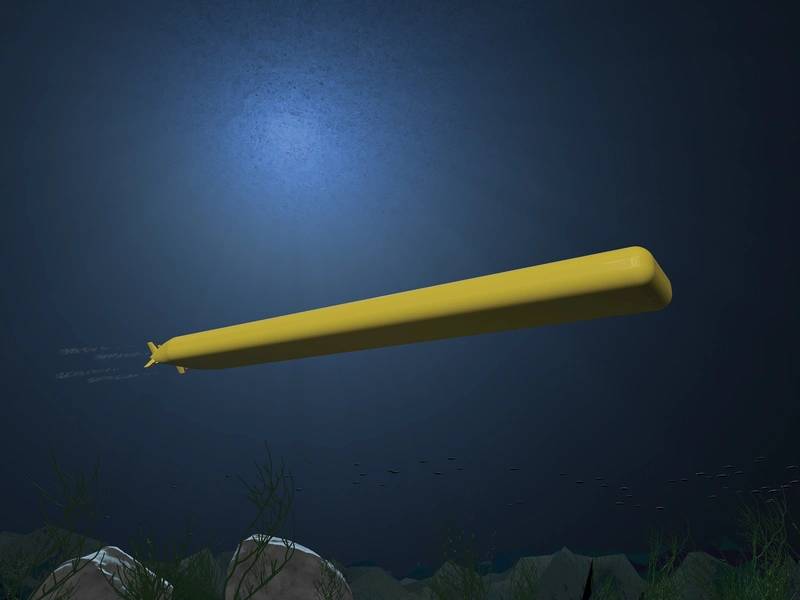
uSEA παρουσιάζει τα uLARS
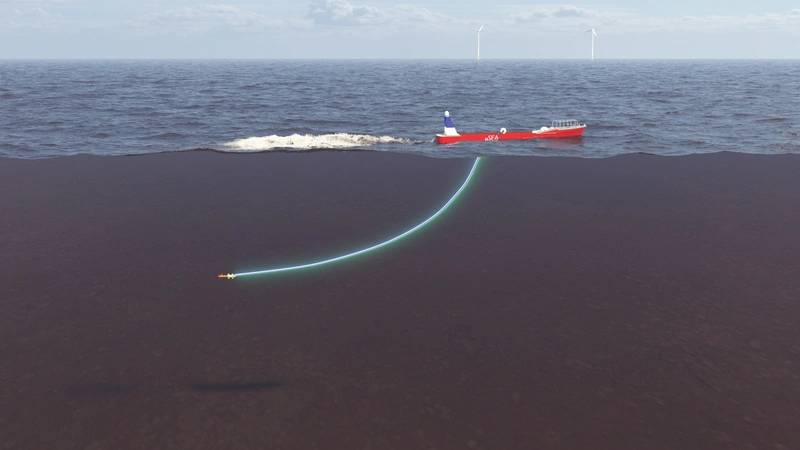
Ένα, το νορβηγικό start-up της τεχνολογίας uSEA, προτείνει ένα υβριδικό σύστημα για να διαταράξει τις υπάρχουσες υποθαλάσσιες επιχειρήσεις με επανδρωμένα σκάφη μέσω ενός συνδυασμού υποθαλάσσιων και επιφανειακών συρμών.
Το uSEA ιδρύθηκε το 2017 και από τότε αναπτύσσει ένα επιφανειακό αεροσκάφος ή ένα μη επανδρωμένο πλοίο επιφανείας (USV) για να υποστηρίξει υποβρύχια πτήση (δηλαδή αυτόνομα υποβρύχια οχήματα ή AUVs), έτσι ώστε να μην χρειάζονται πλέον τα επανδρωμένα πλοία και η επαναφόρτιση της μπαταρίας μπορεί να γίνει στο νερό, αποφεύγοντας τις εργασίες εκτόξευσης και ανάκτησης. Αυτό το καθιστά διαφορετικό από τις άλλες έννοιες επιφανειακών συρμάτων, οι οποίες τείνουν να βασίζονται στην πλήρη ανάκτηση του AUV ή του τηλεχειριζόμενου οχήματος (ROV) για επαναφόρτιση. Το σύστημα της uSEA ονομάζεται uLARS (LARS σημαίνει σύστημα εκτόξευσης και ανάκτησης) για υποβρύχια αεροσκάφη, λέει ο διευθύνων σύμβουλος της USEA Φελίπε Λίμα, ο οποίος υπηρέτησε στο Βραζιλιάνικο Πολεμικό Ναυτικό πριν εργαστεί στο Subsea 7, Aker Solutions και Xodus Group.
Είναι μια φυσική εξέλιξη. Τα σημερινά AUVs γίνονται όλο και πιο ικανά και αξιόπιστα, λέει η Λίμα. "Παίρνουν το χώρο που ήταν η αυλή των ROVs. Αλλά, έχουν έναν περιορισμό. βασίζονται σε μπαταρίες, επειδή δεν είναι καλωδιωμένες σαν ROVs, και χρειάζονται ακόμη μια μητρική, π.χ. ένα σκάφος έρευνας, επειδή οι μπαταρίες τους εξαντλούνται σε 12-48 ώρες. Με κινητό σταθμό σύνδεσης για το AUV, δεν βασίζεστε σε σταθμό σύνδεσης στο βυθό και δεν χρειάζεστε μεγαλύτερο σκάφος επιφάνειας. "
 ULARS uLARS υποβρύχια διεπαφή σύνδεσης (Εικόνα: uSEA)
ULARS uLARS υποβρύχια διεπαφή σύνδεσης (Εικόνα: uSEA)
Το σύστημα περιλαμβάνει μια βυθιζόμενη κεφαλή ρυμούλκησης, με έναν επαγωγικό σύνδεσμο για τη φόρτιση και τη μεταφορά δεδομένων, που λειτουργεί λίγο σαν ανεφοδιασμός σε πτήση των μαχητικών πίδακες. "Αυτό σημαίνει ότι υπάρχει ελάχιστη επίδραση από τα κύματα, επειδή η αποβάθρα είναι σε ελεγχόμενο βάθος", λέει η Λίμα, η οποία έχει μεταπτυχιακό δίπλωμα στη Υποθαλάσσια Μηχανική από το Πανεπιστήμιο του Aberdeen και ένα MSc στην Καινοτομία και την Επιχειρηματικότητα από το Πανεπιστήμιο του Όσλο. Υπάρχει επίσης ένα διαστημόπλοιο που βασίζεται στην πισίνα με βάση την πισίνα για την ανάκτηση του AUV στο κατάστρωμα, με ασφάλεια.
Το σύστημα θα υποστηρίξει την υποθαλάσσια έρευνα σε ρηχά νερά καθώς και σε βαθιά και υπερβολικά βαθιά νερά, λειτουργώντας μια μεγάλη ποικιλία ωφέλιμων φορτίων που κυμαίνονται από πιο συμβατικούς τύπους, όπως σόναρ πλευρικής σάρωσης και ηχοβολείς πολλαπλών ακτίνων έως πιο προηγμένους, όπως σόναρ συνθετικού ανοίγματος.
Η uSEA αναζητά συνεργάτες για την ολοκλήρωση του προγράμματος προεπιλογής, το οποίο αναμένεται μέχρι τα τέλη του επόμενου έτους (2020). Μετά από αυτό, η εταιρεία στοχεύει σε επιχειρήσεις στη θάλασσα και ψάχνει πιλοτικά έργα για να εκτελέσει το 2021.
Ένα iDROP στον ωκεανό
Μια άλλη νορβηγική εταιρεία τεχνολογίας, iDROP, σχεδιάζει να διαταράξει την αγορά της σεισμικής τεχνολογίας του βυθού με τους αυτόνομους ωκεάνιους κόμβους της. Το σύστημα iDROP βασίζεται σε μεμονωμένους κυλινδρικούς κόμβους αισθητήρων (που ονομάζονται μετά από ελληνικές θαλάσσιες νύμφες) που αναπτύσσονται με βαρύτητα και μετατόπιση έρματος για πρόωση και έλεγχο θέσης, για προσγείωση σε συγκεκριμένες προκαθορισμένες θέσεις στον πυθμένα όπου προσγειώνονται σε πόδια αλουμινίου βγαίνουν έξω πριν προσγειωθούν.
 Μια Oceanid του iDROP. Στην ελληνική μυθολογία, οι Ωκεανίδες είναι νύμφες που ήταν οι 3000 κόρες των Τιτάνων Ωκεανός και Ταιθής. (Εικόνα: iDROP)
Μια Oceanid του iDROP. Στην ελληνική μυθολογία, οι Ωκεανίδες είναι νύμφες που ήταν οι 3000 κόρες των Τιτάνων Ωκεανός και Ταιθής. (Εικόνα: iDROP)
Η ιδέα είναι ότι μπορούν να αναπτυχθούν σε ομάδες, που πέφτουν για να σχηματίσουν σχέδια πλέγματος στο βυθό για σεισμικές έρευνες. Οι μπαταρίες του σκάφους τροφοδοτούν τον έλεγχο καθόδου (χρησιμοποιώντας μόνο το 5% της μπαταρίας) και συλλέγουν δεδομένα (για 180 ημέρες) και ενεργοποιούν ένα μηχανισμό που απελευθερώνει το στραγγαλιστικό πηνίο των 30kg - από το αλάτι - επιτρέποντας στις μονάδες να γλιστρούν πίσω στην επιφάνεια, και πάλι υπό έλεγχο, ώστε να στοχεύουν σε έναν αναμενόμενο στόχο. Ένα σύστημα επιφανείας με διάταξη τύπου κυμαινόμενου μεταφορικού ιμάντα θα τα συγκέντρωνε τότε. "Υπάρχει μια ποικιλία σεισμικών τεχνολογιών απόκτησης που είναι κυρίως ρυμουλκούμενες", λέει ο Kyrre J Tjøm, ιδρυτής και διευθύνων σύμβουλος της iDrop, ο οποίος εργάστηκε στο παρελθόν στο Schlumberger και συμβουλεύτηκε Equinor και Geo Solutions για το βυθό. "Υπάρχουν επίσης κόμβοι που τοποθετούνται στο βυθό με ένα ROV. Υπάρχουν άλλοι, όπου μπορείτε να τους πετάξετε πάνω από το πλάι με σκυρόδεμα και μερικές προωθημένες εναλλακτικές λύσεις. Το σύστημά μας θα αφαιρέσει την ανάγκη για μεγάλα σκάφη ειδικού τύπου με βαριά μηχανήματα χειρισμού και χρονοβόρες λειτουργίες ROV. "
Οι ομάδες Ωκεανίδων μπορούν να αναπτυχθούν γρήγορα και η κοκκοποίηση των σημείων του αισθητήρα (δηλαδή η κάλυψη της περιοχής και συνεπώς η ανάκτηση των δεδομένων) μπορεί να αυξηθεί, λέει. Αυτό είναι χάρη σε 69 μοίρες στην κατακόρυφη αυτόνομη πλευρική μετατόπιση, με κάθε κόμβο να «πέφτει» σε μια προκαθορισμένη θέση. "Εάν θέλετε να αναπτύξετε έναν αισθητήρα σε βάθος 1200 μ. Νερού, μπορείτε να φτάσετε 2 χιλιόμετρα μακριά από το πλοίο της επιφάνειας και να εγκαταστήσετε ένα κομμάτι αισθητήρων, παρά μια γραμμή", λέει.
Οι παρτίδες των εννέα κόμβων, το καθένα με ένα επαγωγικό μόντεμ, τον αναμεταδότη και το φορτίο του σεισμικού αισθητήρα, θα μπορούσαν να αναπτυχθούν σε 15 λεπτά, εξοικονομώντας χρόνο 10 φορές σε σχέση με τις καθιερωμένες μεθόδους, λέει ο Tjøm. Ένα ψηφιακό δίδυμο, βασισμένο σε εκτεταμένη μοντελοποίηση και δοκιμή, θα μπορούσε να χρησιμοποιηθεί για τον εντοπισμό τυχόν περιβαλλοντικών επιπτώσεων, π.χ. κύματα, ρεύμα, βάθος κλπ., και επομένως επιτρέπουν τον έλεγχο της κατάβασης.
"Εξετάζουμε την επανάσταση στον τρόπο με τον οποίο εγκαθίστανται κόμβοι ωκεανού στο βυθό", λέει ο Tjøm. "Οι ανταγωνιστές κάνουν 40-170 ημερησίως ανά και χρειάζονται δύο ROVs, DP-ελεγχόμενα συστήματα διαχείρισης κόμβων, ένα μεγάλο σκάφος και εξειδικευμένο πλήρωμα. Όσο πιο βαθιά πηγαίνετε, οι ROVs είναι πιο αργές καθώς χρειάζονται περισσότερη ώθηση για να τραβήξουν τον ομφάλιο λώρο. Θα κάναμε μόνο λιγότερα από 1000 ημερησίως με ένα πρότυπο θαλάσσιο πλήρωμα. "
Πολλά έργα έχουν τεθεί στο έργο Ωκεανίδες πίσω από τις σκηνές και μόλις τώρα η τεχνολογία προωθείται. Στην πραγματικότητα, το έργο ξεκίνησε το 2010, με ένα πρωτότυπο να χτίστηκε το 2013/14. Το iDROP δημιούργησε επίσης ένα σύστημα ανάκτησης και πραγματοποίησε μια δοκιμή στην ξηρά, για την επαλήθευση του συστήματος ανάκτησης. Μια δεύτερη πιλοτική δοκιμασία, η οποία αποκτά τρισδιάστατα σεισμικά δεδομένα, στα βαθιά νερά, προγραμματίζεται για το τρέχον έτος στη Βόρεια Θάλασσα. Εννέα οχήματα έχουν κατασκευαστεί και επρόκειτο να εγκαταλείψουν τη θάλασσα για δοκιμές στο πρώτο εξάμηνο, με περισσότερα να προγραμματιστούν να κατασκευαστούν το επόμενο έτος.
Το MUM είναι η λέξη
Το Thyssenkrupp Marine Systems (MS), τμήμα του γερμανικού βιομηχανικού ομίλου ετερογενών δραστηριοτήτων, εργάζεται σε διαφορετική κλίμακα τόσο από το uSEA όσο και από το uLARS. Η εταιρεία σχεδιάζει ένα πολύ μεγάλο (μέχρι 50m) μη επανδρωμένο υποβρύχιο όχημα (UUV), το οποίο ονομάζεται τροποποιημένη υποβρύχια μητρική (MUM), με βάση ένα αρθρωτό σχεδιασμό, που περιλαμβάνει βασικές μονάδες και μονάδες αποστολής.
Η σκέψη πίσω από αυτό είναι ότι η σημερινή υποθαλάσσια αγορά υποβρυχίων οχημάτων κυριαρχείται από εξειδικευμένα προϊόντα, χωρίς κανένα όχημα να μπορεί να χρησιμοποιηθεί για πολλαπλά καθήκοντα. Έτσι, η Thyssenkrupp έθεσε ως στόχο τη σχεδίαση ενός αρθρωτού συστήματος, λέει ο Willem Hendrik Wehner, ο οποίος επιβλέπει το έργο στο Thyssenkrupp MS.
 Η έννοια του MUM Thyssenkrupp (Εικόνα: Thyssenkrupp)
Η έννοια του MUM Thyssenkrupp (Εικόνα: Thyssenkrupp)
Βασικές ενότητες θα είναι συστήματα περιποίησης και καταδύσεων, μπαταρία, πρόωση και κυψέλες καυσίμου υδρογόνου. Στη συνέχεια, οι μονάδες εστίασης της αποστολής θα μπορούσαν να κυμαίνονται από την ανάπτυξη του σεισμικού κόμβου (OBN) (> 1000 OBNs) έως τα συστήματα γεώτρησης πυρήνα ή από τη μονάδα ελέγχου υποθαλάσσιου να μετατραπούν σε φιλοξενία απομακρυσμένων οχημάτων, τα οποία θα χρησιμοποιούν το μεγάλο UUV ως μητρικό πλοίο. Ένα δομοστοιχείο MUM θα αποτελείται από μονάδες που έχουν το μέγεθος των τυποποιημένων εμπορευματοκιβωτίων 20ft ή 10ft. Μπορούν να συνδυαστούν σύμφωνα με τις προδιαγραφές αποστολής με αποτέλεσμα αρκετά διαφορετικά οχήματα, από 80 μετρικούς τόνους έως πάνω από 300 μετρικούς τόνους ή από πλάτους μήκους 20 μ., Πλάτους 4 μ. Και από 3 μ. Έως 50 μ., Πλάτους 7 μ. Και 3 μ. υψηλή, με την κατανάλωση ενέργειας να εξαρτάται από το ωφέλιμο φορτίο και την ταχύτητα πρόωσης.
"Άλλα υποβρύχια οχήματα έχουν προσεγγιστικές προσεγγίσεις, αλλά κυρίως όσον αφορά την προσαρμογή του τμήματος ωφέλιμου φορτίου ή την επέκταση της αντοχής προσθέτοντας περισσότερη ενεργειακή χωρητικότητα", λέει ο Wehner. "Ένα καλό παράδειγμα είναι το SeaCat AUV της ATLAS, το οποίο μπορεί να αλλάξει το ωφέλιμο φορτίο της με την εναλλαγή της κεφαλής του οχήματος και μπορεί να επεκτείνει το εύρος προσθέτοντας περισσότερη χωρητικότητα μπαταρίας."
Ο Wehner λέει ότι το όχημα MUM θα είναι σε θέση να ταξιδέψει εκατοντάδες χιλιόμετρα, ανάλογα με τη διαμόρφωση του οχήματος, με την ισχύ των κυψελών καυσίμου υδρογόνου 80-160kW και κάτω από χιλιάδες μέτρα βάθους νερού. "Το υποβρύχιο εύρος είναι κλιμακωτό και στην περιοχή των 100 ναυτικών μιλίων. εντελώς επαρκείς για τις τρέχουσες περιπτώσεις χρήσης ", λέει. "Το σύστημα αποθήκευσης αερίου για την κυψέλη καυσίμου είναι περίπου τριπλάσιο από τις μπαταρίες σε σχέση με την ενέργεια ανά όγκο και ακόμη περισσότερο όσον αφορά το βάρος. Ωστόσο, αν θέλετε να καλύψετε περισσότερα από 1000 ναυτικά μίλια, θα συνιστούσαμε μια διαμετακόμιση κοντά στην επιφάνεια με μια πιο συμβατική π.χ. ντιζελοκινητική προσέγγιση. Η ιδέα επιτρέπει αυτό. "
Τα στοιχεία καυσίμου υδρογόνου αποτελούν αποδεδειγμένη τεχνολογία ανεξάρτητη από τον αέρα για τα υποβρύχια Thyssenkrupp. η εταιρεία έχει βαθιά εμπειρία με τα κυψέλες καυσίμου υδρογόνου στο γερμανικό υποβρύχιο HDW Class 212A καθώς και άλλα υποβρύχια. Οι μπαταρίες ενδέχεται να είναι απαραίτητες για φορτία αιχμής ορισμένων ωφέλιμων φορτίων, αλλά τα περισσότερα από τα τρέχοντα σχέδια οχημάτων MUM διαθέτουν μόνο μια μικρή μπαταρία εφεδρικής / έκτακτης ανάγκης, λέει ο Thyssenkrupp. Ένα δομοστοιχείο για επιφανειακή ή σχεδόν επιφανειακή διαμετακόμιση σχεδιάζεται αυτή τη στιγμή, καθώς το σύστημα κυψελών καυσίμου έχει τις δυνάμεις του για τη διατήρηση υποβρύχιων εργασιών.
Για επικοινωνία μεγάλης εμβέλειας, σε μεγάλες αποστολές, η Thyssenkrupp MS θέλει να χρησιμοποιήσει αυτοκινούμενα μόντεμ ή αυτόνομους κόμβους επικοινωνίας με δυνατότητα αμφίδρομης μετάδοσης δεδομένων για να δημιουργήσει ακουστικές επικοινωνίες μεγάλης ακτίνας μέσω μιας αλυσίδας αυτών των κόμβων, καθώς και τοπική πλοήγηση ή 3D τοποθέτηση μέσω μόντεμ USBL. Αυτά αναπτύσσονται στο πλαίσιο ενός υποέργου που ονομάζεται NaviMUM από την EvoLogics και θα αναπτυχθούν από ένα περιοδικό περιστροφών στο MUM.
Η EvoLogics καλεί την ιδέα να είναι ένα αυτο-οργανωμένο κινητό υποβρύχιο δίκτυο, με τους κόμβους να σχηματίζουν σταθμούς αναμετάδοσης καθώς και την παροχή θέσης. Αυτά θα εκτοξεύονταν αυτόνομα σε μια περιοχή αποστολής, θα αναλύουν το περιβάλλον επικοινωνίας, θα κρατούσαν τη θέση και θα διασυνδέονταν για να σχηματίσουν ένα ευέλικτο υποβρύχιο δίκτυο. Κάποιοι θα έχουν ένα δέκτη GNSS, για να πάρουν περιοδικές πραγματικές θέσεις καθορισμού θέσεων, λέει ο Wehner.
"Πολύ μεγάλα οχήματα όπως το MUM ειδικότερα χρειάζονται ισχυρούς αισθητήρες και αλγόριθμους για αυτόνομη αποφυγή εμποδίων και επανασχεδιασμό στίβου", λέει ο Thyssenkrupp. "Οι αυτοελεγχόμενοι αλγόριθμοι ελέγχου που αντανακλούν τη μεγάλη ποικιλία πιθανών διαμορφώσεων οχημάτων θα υποστηρίξουν την ιδέα του οχήματος. Το έργο αναπτύσσει ένα σύστημα κινητής επικοινωνίας και πλοήγησης με αυτοτροφοδοτούμενα μόντεμ LBL / USBL που μπορούν να δημιουργήσουν ένα δίκτυο και να αποβάθρα στο όχημα MUM για μεταφορά και φόρτιση. "
Η Thyssenkrupp MS κατασκευάζει μια μικρή έκδοση του MUM, μήκους 5 μέτρων, που θα είναι έτοιμη για δοκιμές το καλοκαίρι (2019). Πολλές από τις έννοιες, ιδίως το λογισμικό αυτονομίας και οι κινητές επικοινωνίες, θα δοκιμαστούν σε αυτό το σύστημα. Οι βασικές τεχνολογίες, όπως η νέα κυψέλη καυσίμου υδρογόνου, καθώς και ο νέος σχεδιασμός της γάστρας πίεσης θα δοκιμαστούν επίσης, σε πραγματικό μέγεθος, φέτος.
Ένα αυτοκίνητο MUM πραγματικής κλίμακας πρόκειται να κατασκευαστεί σε δοκιμές από το 2020, με δοκιμές και δοκιμές μέχρι το 2023-24. Η ανάπτυξη υποστηρίζεται από μια συμβουλευτική ομάδα της βιομηχανίας πετρελαίου και φυσικού αερίου, συμπεριλαμβανομένης της επιχείρησης Equinor, της σεισμικής εταιρίας PGS και του υποβρυχίου Contractor Boskalis.
Η εταιρεία διαθέτει επίσης το ATLAS ELEKTRONIK, το Τεχνικό Πανεπιστήμιο του Βερολίνου και το Πανεπιστήμιο του Rostock που ασχολούνται με το έργο, σχετικά με το σύστημα ελέγχου και την προσομοίωση του συστήματος αντίστοιχα.
Τα μη επανδρωμένα σκάφη πολλαπλασιάζονται στη σημερινή «υβριδική ναυτική υπερβολή»

Υποθαλάσσιες υδροθερμικές οπές ανακαλύφθηκαν στην περιοχή Doldrums
. Οι επιστήμονες ανακάλυψαν δύο νέα πεδία υδροθερμικών αεραγωγών σε μία από τις λιγότερο εξερευνημένες περιοχές του Ατλαντικού Ωκεανού, τη Ζώνη Μεγαμετασχηματισμού και Ρωγμάτωσης Doldrums. Αυτό το μεγάλο, τεκτονικά ενεργό σύστημα διασχίζει την Μεσοατλαντική Ράχη, η οποία σχηματίζει τη μακρύτερη οροσειρά στον κόσμο. Αυτοί οι τύποι πεδίων αεραγωγών είναι σπάνιοι λόγω των υβριδικών «υδραυλικών» συστημάτων τους, που διαθέτουν τυπικά βολ...")
Σπάζοντας τον πάγο στην έρευνα για την Αρκτική

Βαθύτερη έρευνα: Προκλήσεις και τάσεις στη βιομηχανία βυθοκόρησης

Φύτευση των Σπόρων της Έμπνευσης: Αποκατάσταση Χελόχορτου

Από την αβεβαιότητα στο πλεονέκτημα: Ο WHOI λανσάρει νέες πρωτοβουλίες για τους εταίρους του κλάδου

Σχεδιασμός στεγανοποίησης δακτυλίου Ο, Μέρος 2: Ακτινικές στεγανοποιήσεις για εξωτερική πίεση
")
Κλιμάκωση του μη επανδρωμένου στόλου: Από μεμονωμένα σκάφη σε επιχειρήσεις σε επίπεδο συστήματος

Η ερευνητική ομάδα του Ινστιτούτου Ωκεανών Schmidt ανακαλύπτει 31 νέα είδη

Η AUKUS θα αναπτύξει UUV, η παράδοση έχει οριστεί για το 2027

Ο Vard ολοκληρώνει παραγγελία ρεκόρ 800 εκατομμυρίων δολαρίων για ερευνητικό σκάφος βαθέων υδάτων
")
Οι Ørsted και PGE εγκαθιστούν τα πρώτα θεμέλια στο υπεράκτιο αιολικό πάρκο Baltica 2 της Πολωνίας
-170484 "(Πίστωση: Βαν Όορντ)")